
Mars is known for its unique geological features. Olympus Mons is a massive shield volcano 2.5 times taller than Mt. Everest. Hellas Planitia is the largest visible impact crater in the Solar System. However, Mars’ most striking feature is Valles Marineris, the largest canyon in the Solar System.
This fascinating geological feature begs to be explored, and a team of German researchers think that a swarm of robots is best suited to the task.
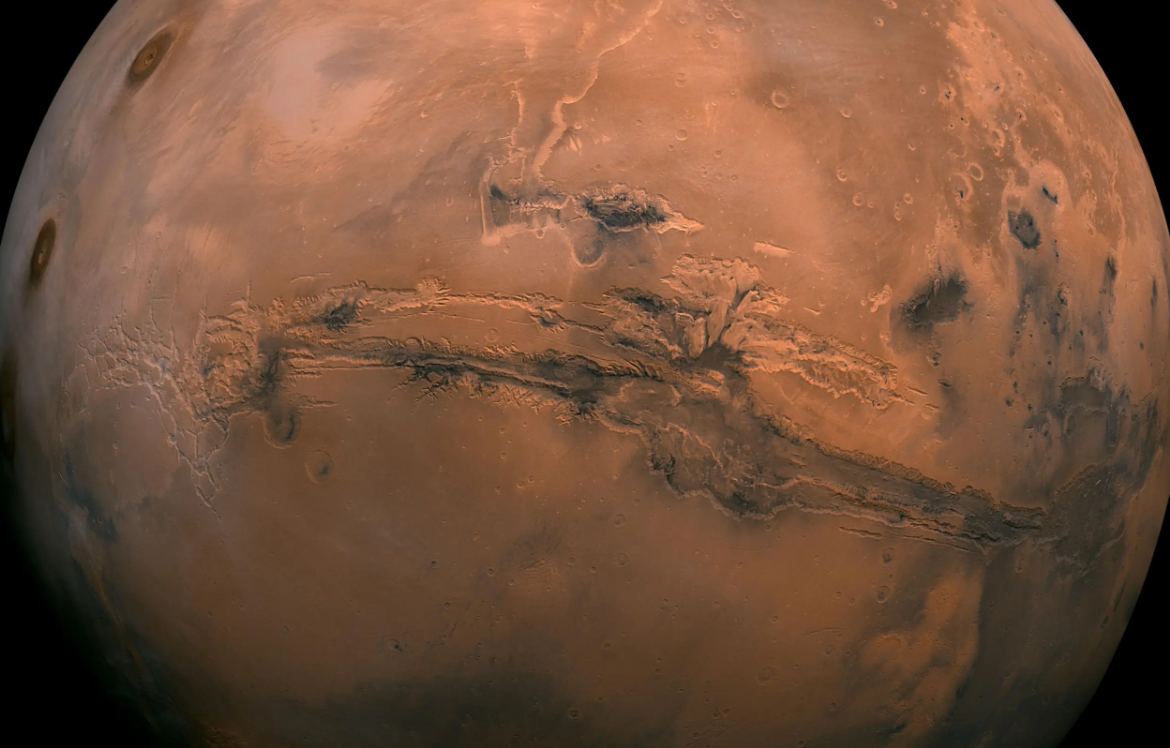
Valles Marineris (VM) is named after NASA’s Mariner 9 spacecraft, which discovered the massive canyon in 1971. It’s about 4,000 km long, 8 km deep at its deepest point, and 600 km wide in some places. These measurements dwarf the Grand Canyon in the USA.
From a distance, VM looks like a scab on Mars’s surface. It’s an interconnected network of chasms, faults, valleys, and probably caves. Unlike the Grand Canyon, VM wasn’t excavated by a flowing river. Instead, scientists think it was likely formed by rift faults, regions on the surface where plates receded from one another.
German scientists are developing a way to explore this unique region. It’s called the Valles Marineris Explorer (VaMEx), and the idea dates back several years. VaMEx is an initiative of the German Aerospace Centre (DLR) and it’s making significant progress.
NASA’s Mars rovers have made great progress in understanding Mars and its potentially habitable past. They’re incredible machines that put humanity’s inventiveness on display. But they’re ill-suited to rough, obstacle-strewn terrain like Valles Mariners. Instead of building one robotic vehicle, VaMEx will build several types of vehicles and stationary units that will work together to explore VM and its chasms, valley walls, and caves.
VaMEx will be a swarm of interconnected vehicles that fly, move across the ground, and visit caves in VM. They’ll be linked with a ground station that acts as a command center, and a satellite will provide communications with Earth. The vehicles will collect images and data and send them to the command center and an orbiter or satellite, then to Earth.

VaMEx is particularly aimed at caves that scientists think are likely plentiful in VM. Caves are protected from radiation, and if Mars hosted simple life in its past, there may be traces of it deep in these caves. VaMEx also includes ground repeater stations that will allow cave-exploring robots to share data and images in real time.
All of this will require finely tuned communications.
“We have given our sub-project the name ‘VaMEx3-MarsSymphony’ because the aim is to make the individual elements of the robot swarm play together harmoniously like an orchestra,” said project leader Professor Hakan Kayal. Kayal is a professor of Astronautics at the Satellite Mission Control Centre at the University of Würzburg.

Units called autorotation bodies are also part of the swarm. Autorotation is a term from rotary-wing (helicopter) flight. It describes a situation where power to the rotors is lost, and as the helicopter falls toward Earth, air makes the rotors spin, providing enough energy for a controlled descent. VaMEx’s autorotation bodies aren’t helicopters. They’re like maple seeds, which float gently to the ground, spinning as they descend. Once they’ve reached the surface, they’re stationary.
VaMEx is also taking an unusual approach to cameras. The stationary ground station will feature a camera that monitors the Martian sky. “All previous Mars missions have focussed on the surface of the planet, but we want to look upwards for the first time,” says Hakan Kayal. The camera can monitor cloud formation and dust in the atmosphere. It will also capture any transient phenomena like unusual cloud illumination or lightning.
NASA’s Mars rovers have occasionally imaged the Martian sky. The gif below is from the Perseverance rover, which used one of its navigation cameras to capture images. A purpose-built sky-monitoring camera would image the Martian sky like never before.
via GIPHY
It will also see incoming meteors, and data shows that one about the size of a basketball strikes Mars every day. “We could further substantiate this with data if we film the entry of meteorites with our UAP camera and correlate these events with the seismic signals,” says Hakan Kayal.
VaMEx faces many technical challenges that still need to be overcome. The mobile robots will need powerful route-finding AI to maneuver through difficult terrain, especially in caves. It takes about 40 minutes for a signal to travel from Mars and back, making remote real-time control impossible.
There are also communication challenges. A key challenge is getting VaMEx’s ground segments to communicate with a satellite. One company is working on special transceivers that operate in the Ka-band to handle all of the scientific data. The Ka-band is used in satellites because it allows higher bandwidth communications, but landers currently use the S or X-band. The issue is that the Ka-band usually requires more and bulkier equipment, including larger antennae, that may not be practical on a surface robot.
In August, scientists tested some aspects of VaMEx at the DLR site in Oberpfaffenhofen. They tested LIDAR (Light Detection and Ranging), IMU (Inertial Measurement Unit), and GNSS (Global Navigation Satellite System) sensors for ground truth validation. This compared sensor information against known data. They also successfully tested Wi-Fi-like communication systems and radio-ranging.
“One of the highlights of our field test was the live test of multi-robot SLAM (Simultaneous Localization and Mapping),” the VaMEx website says. “In a dual-robot scenario, we tested the real-time capabilities of our SLAM algorithms.” They say the results were promising and illustrate a way forward for individual robots to cooperate.

Not everything in the tests went well, though. The Robot Operating System 2 (ROS2) encountered some challenges with so many units trying to communicate with one another. Bandwidth and synchronization were both problematic.
These results are helping the VaMEx team prepare for upcoming analog tests in 2025. These will take place at a quarry in Germany, where the robot swarm will be tested after improvements gained from August’s tests. The Wurzburg UAP (Unidentified Aerial Phenomena) Skycam will be part of these tests, with its resource-hungry video data added to the mix to test the system’s overall robustness.

If all goes well, the next step is to harden the VaMEx equipment. Mars has much harsher conditions, with much lower temperatures, a thin atmosphere, and global dust storms that can interrupt exploration.
“In a possible follow-up project, the hardware would have to be adapted for use on Mars,” explains Hakan Kayal.
Author: Space and Astronomy News
Maybe later



No comments! Be the first commenter?